Riabilitazione Robotica
La riabilitazione robotica si divide in due macrocategorie: robot terapeutici (utilizzati in fase di riabilitazione post trauma) e robot di assistenza (utilizzati come ausilio alle attività quotidiane in caso di arti compromessi) (Siciliano et al. 2008). I dispositivi possono essere classificati in base alla modalità operativa:
- Dispositivi per la Mobilizzazione Continua Passiva (CPM);
- Dispositivi per la Facilitazione Neuromuscolare Propriocettiva (PNF);
- Esoscheletri e Robot per l’addestramento dell’andatura;
- Dispositivi integrati con sistemi di realtà virtuale.
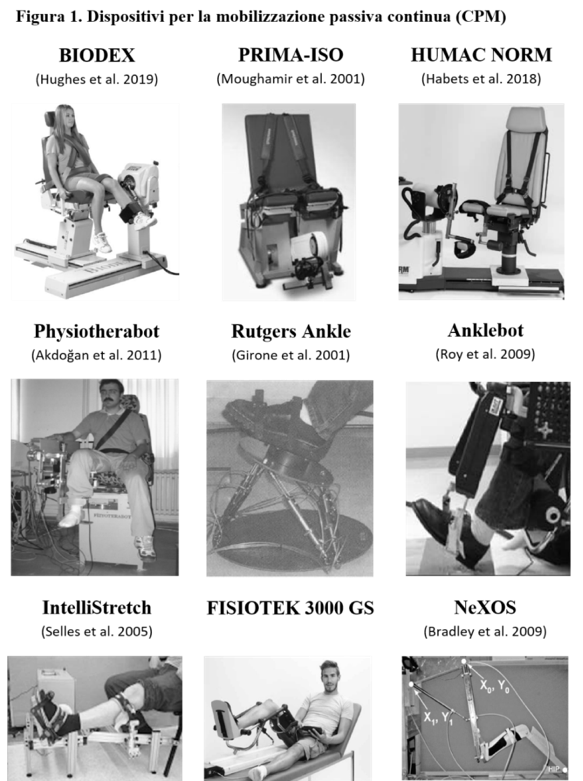
Dispositivi per la mobilizzazione passiva continua (CPM)
Con il termine CPM (Continuous Passive Motion) vengono descritti quei dispositivi generalmente fissati ad una struttura di base (esterna, o integrata nel dispositivo stesso), equipaggiati con sistemi meccanici fissati a giunti rotazionali o traslazionali a livello delle articolazioni (nel caso di arto inferiore: dell’anca, del ginocchio e della caviglia). La forza viene esercitata dal dispositivo su una o più strutture anatomiche dell’arto inferiore: il dispositivo permette generalmente l’esecuzione del movimento solo su un piano, di solito parallelo al piano sagittale. I dispositivi CPM permettono all’operatore di definire il range di movimento delle principali articolazioni dell’arto inferiore attraverso informatiche dei sistemi di controllo (anche informatizzati). Il processo di riabilitazione prevede l’incremento del ROM dell’articolazione nel tempo, con l’obiettivo di aumentare la mobilità articolare. I dispositivi CPM sono macchine passive perché non richiedono al paziente di sviluppare contrazioni volontarie della muscolatura scheletrica e di esercitare alcuna forza per la realizzazione del movimento (Marko et al. 2011).
Dispositivi per Facilitazione Neuromuscolare Propriocettiva
La facilitazione neuromuscolare propriocettiva (Proprioceptive Neuromuscolar Facilitation, PNF) è una particolare tecnica di stretching, che combina lo stretching passivo e quello isometrico (Brotzman et al. 2008). La tecnica PNF, nata per la neuro-riabilitazione, trova una vasta applicazione per la riabilitazione di pazienti con affezioni muscolo-scheletriche determinate da un alterato controllo neuromuscolare degli arti, del collo e del tronco. Questa terapia manuale è un trattamento volto a valutare il movimento e a trattare eventuali disfunzioni, aumentando la risposta del sistema neuromuscolare grazie alla stimolazione dei propriocettori. Il PNF può essere diviso in tre fasi:
1) Stretch (posizione statica di allungamento muscolare);
2) Contrazione volontaria (del muscolo sottoposto ad allungamento);
3) Re-stretch (allungamento muscolare maggiore del precedente).
Esoscheletri per l’addestramento dell’andatura e la riabilitazione
Gli esoscheletri robotici per la riabilitazione dell’arto inferiore possono essere divisi in:
- trainer per la deambulazione umana, con l’obiettivo del recupero della deambulazione dei pazienti;
- dispositivi con specifici scopi di riabilitazione in base alle specifiche del robot (Al-Quraishi et al. 2018).
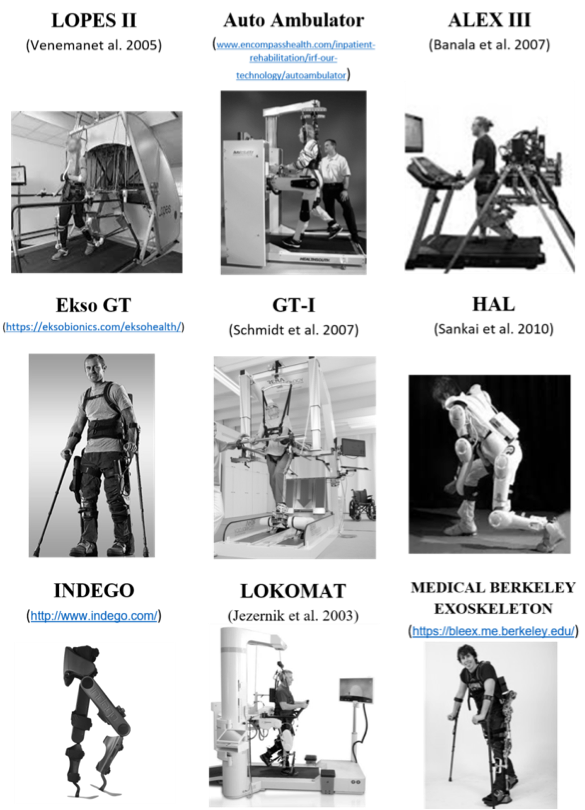
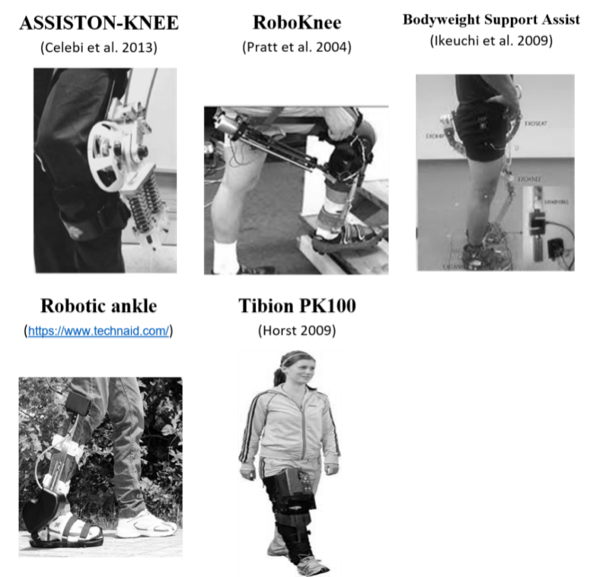
Recentemente, Sanchez-Villamañan et al. (2019) hanno analizzato la letteratura scientifica individuando 52 esoscheletri utilizzati per la riabilitazione degli arti inferiori. Questi dispositivi sono stati classificati e schematizzati in una figura in base a: tipologia di funzione (riabilitazione o assistenza), numero di DoF attivi e passivi, utilizzo nelle patologie, sistema di attuazione (elastici, a rigidità variabile o pneumatici); applicazione monolaterale o bilaterale.
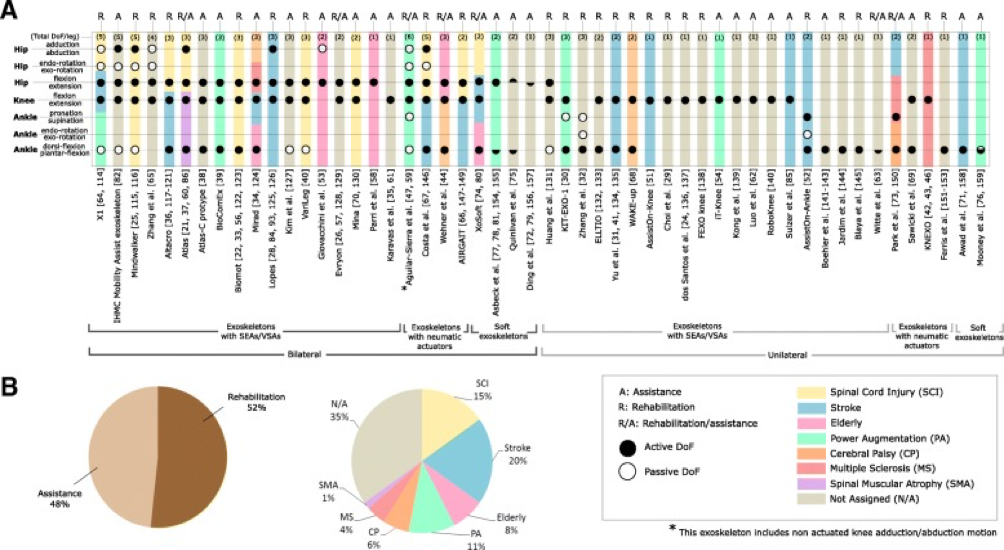
Di seguito alcuni esempi di esoscheletri bilaterali e monolaterali.

Dispositivi integrati con sistemi di realtà virtuale
I dispositivi integrati con sistemi di realtà virtuale/serious games, appartengono a una classe di strumentazione che consente l’implementazione di terapie riabilitative innovative, personalizzate sui bisogni del paziente. In particolare l’ambiente di realtà virtuale è utilizzato nella riabilitazione attiva della caviglia poiché consente un feedback visivo e uditivo che incoraggia la consapevolezza del paziente. Recentemente, Zeng et al. (2018) hanno condotto una review sistematica sugli studi clinici che valutavano l’efficacia dei dispositivi riabilitativi per la caviglia associati ai sistemi di giochi in realtà virtuale. Gli autori concludono che la riabilitazione (singola o pluri-sessioni) della caviglia associata ai giochi con realtà virtuale migliora significativamente la capacità di controllo motorio dell’articolazione. Sebbene, le strategie di allenamento/terapia devono essere personalizzate in base al paziente e in base al livello di disabilità della caviglia. Bisogna distinguere due differenti sistemi di videogiochi applicati alla riabilitazione: videogiochi specificatamente progettati e videogiochi commercializzati (Aminov et al. 2018). Sebbene entrambi i sistemi forniscono dei feedback sul movimento eseguito dal paziente, i videogiochi specificatamente progettati dai ricercatori della riabilitazione, forniscono un feedback aumentato al fine di sviluppare il senso di posizione del paziente nello spazio (Wilson et al. 2016; Duckworth et al. 2013; Duckworth et al. 2015), per rafforzare diversi parametri di movimento (come traiettoria ed endpoint) e ridurre i movimenti errati (Subramanian et al. 2007; Subramanian et al. 2013). Mentre, i videogiochi commercializzati utilizzati per la riabilitazione hanno il vantaggio di essere prontamente disponibili e relativamente economici rispetto ai precedenti (Lincoln et al. 2000).
Korn et al. (2017) hanno provato a stilare le best practices (migliori pratiche) della riabilitazione “gamificata”, cioè dell’utilizzo dei videogiochi nella riabilitazione. Sebbene, in letteratura si concordi sul fatto che l’aggiunta di un gioco alla riabilitazione possa migliorare la motivazione e la partecipazione dei pazienti alle sessioni di riabilitazione, ci sono indicazioni su quanto complessi dovrebbero essere i videogiochi. Gli autori, in particolare, hanno dimostrato che i videogiochi con un design semplice aiutano a sostenere la motivazione nei pazienti, tuttavia, non possono compensare forti limitazioni interne come la paura del dolore, la noia o la semplice pigrizia. Mentre, videogiochi più coinvolgenti per la riabilitazione potrebbero aumentare ulteriormente la motivazione, ma i risultati mostrano che questo potrebbe essere un passo nella direzione sbagliata perché se l’immersione (distrazione) è elevata, il paziente potrebbe non riconoscere i segnali di dolore e l’esercizio potrebbe persino causare ulteriori danni e lesioni.
Dispositivi SMART REHAB
I dispositivi modulari SMART REHAB vengono indossati dal paziente abilitando l’esecuzione di esercizi riabilitativi in ambiente virtuale in riferimento ad uno specifico target personalizzato in relazione al percorso riabilitativo previsto. I dispositivi, durante l’esecuzione del movimento, sono programmati per generare una resistenza variabile in relazione alla posizione e all’intenzione di moto del paziente. Tale personalizzazione è selettiva rispetto ai differenti distretti muscolari di ciascuna articolazione dell’arto inferiore (ginocchio e caviglia), abilitando il training motorio in pazienti con esiti da post-trauma (ortopedici) o da ictus (neurologici), incrementandone il tono muscolare e il recupero funzionale. I dispositivi sono in grado, ad esempio, di simulare l’effetto di un trattamento riabilitativo in acqua facendo interagire il paziente con una resistenza viscosa variabile.
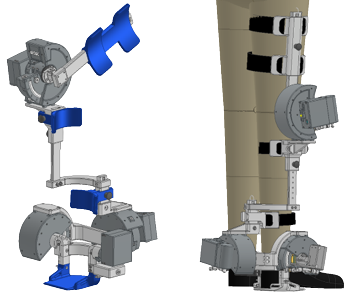
I dispositivi indossabili modulari presentano una catena cinematica compatibile con la catena anatomica del paziente (1 grado di libertà per la riabilitazione dell’articolazione del ginocchio e 1 o 2 gradi di libertà per la riabilitazione della caviglia).
La specifica configurazione dei giunti e la presenza di supporti (link) regolabili consente di avere un’elevata adattabilità ai differenti parametri antropometrici dei pazienti e di semplificare le procedure di vestizione e rimozione.
I dispositivi SMART REHAB, per la riabilitazione delle articolazioni dell’arto inferiore, rappresentano un importante strumento in grado di facilitare il lavoro del fisioterapista consentendogli di seguire più pazienti contemporaneamente. Infatti, tali dispositivi possono essere utilizzati per una molteplicità di esercizi, controllando e limitando l’ampiezza del movimento e garantendo al paziente un’autonomia all’interno della struttura riabilitativa.
Il sistema SMART REHAB trova la sua applicazione clinica per creare una “indipendenza riabilitativa” nel paziente. L’opportunità di assegnare esercizi riabilitativi personalizzati, sotto il controllo dei dispositivi SMART REHAB e regolarmente monitorato dal fisioterapista, rende più rapida ed efficace la ripresa funzionale del paziente.
Inoltre, i dispositivi hanno come obiettivo di aumentare e migliorare la confidenza del paziente nell’esecuzione degli esercizi, perché minuziosamente codificati dai dispositivi sulle caratteristiche individuali del paziente (angoli di movimento, direzione del movimento e grado di resistenza al movimento).
I dispositivi sono in grado di limitare i movimenti a uno o due gradi di libertà di ogni singola articolazione o di combinare contemporaneamente movimenti dell’articolazione del ginocchio e della caviglia.
Un aspetto tecnico e clinico, altrettanto importante e utile nel recupero di un’articolazione, è la modulazione del tipo di lavoro muscolare da eseguire durante l’esercizio riabilitativo. I fluidi ER, presenti a livello dei giunti dei dispositivi, creano un movimento viscoso, in grado di simulare gli esercizi eseguiti in acqua, che velocizzano il recupero della forza e della resistenza muscolare durante le diverse fasi della riabilitazione.